17. Beyond the Ideal Case - Integrator Windup
The “Ideal” form of the PID controller that you have been using thus far is rarely used in industry. The “time constant” form is more commonly seen.
A few of the significant deficiencies of the ideal form are illustrated presently.
You saw that, in a well-tuned system, the integral term was able to eliminate steady-state error by making the control effort proportional to the accumulated error. This mode of operation can however present a danger. Imagine if the setpoint were suddenly changed by a significant amount and the system dynamics are slow. For example, if the temperature in a room is currently 50° F (10° C) and the setpoint on the thermostat were then moved to 75° F (24° C). The heating system would probably take tens of minutes, if not hours, to drive the temperature to the desired setpoint. Until the tracking error is zero, the integral term would continue to grow (i.e., “windup”), hence the name integral windup.
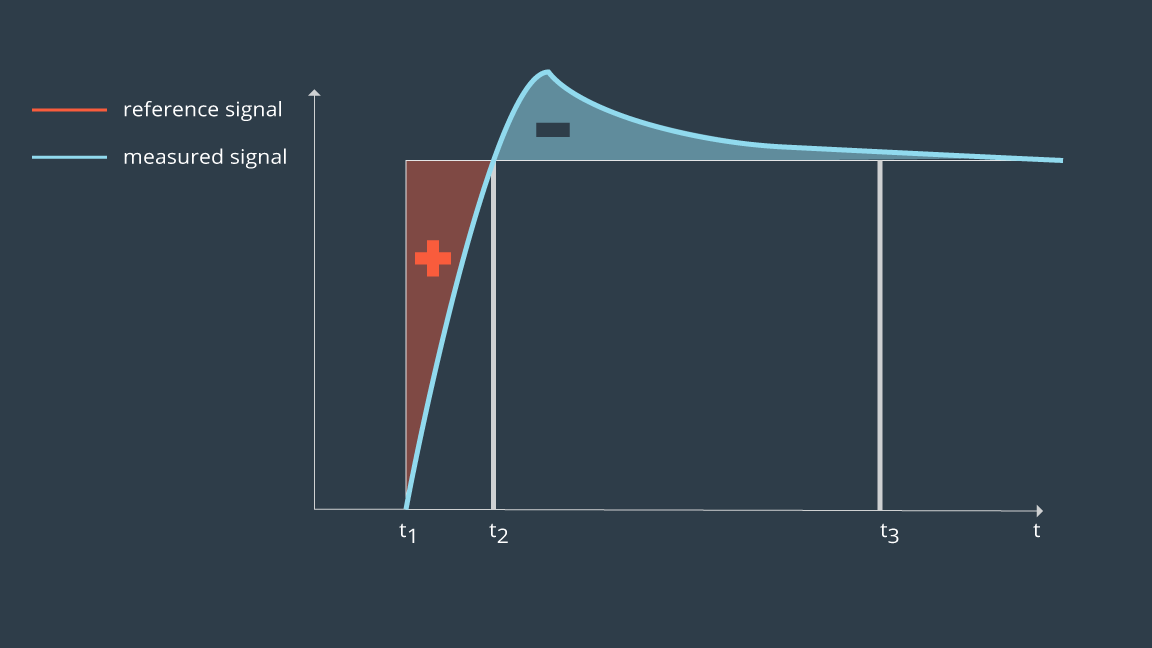
Because of the accumulated error and slow system dynamics, the controller would continue running the furnace (increasing the temperature) even though the setpoint were reached, thus causing a large overshoot. The system would then take time to “unwind” the accumulated error before it again reaches the desired setpoint.
Another situation that can create integral windup is due to actuator saturation. If the setpoint were changed far enough it may not be possible for the system to ever reach the desired goal even if the actuators were operating at 100% output (i.e., were saturated). The only hope is to move the setpoint to an achievable level.
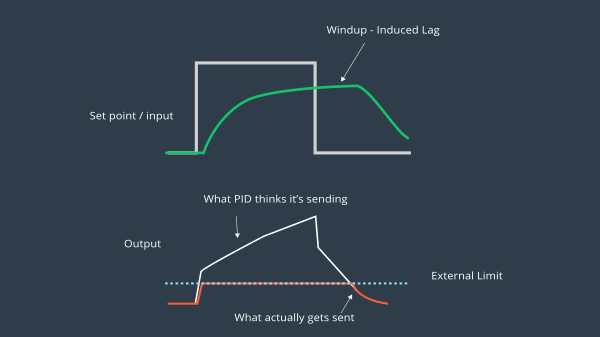
Many strategies have been devised to combat integrator windup. One simple method is to stop integrating the error if the controller output is fully saturated.